Em vez de veículos pesados de seis rodas, a atenção dos pesquisadores da exploração espacial agora se volta para um “cão espacial” robótico. Desenvolvido na Suíça, o sistema leva instrumentos de medição de altíssima precisão na ponta de um braço robótico - e examina rochas em minutos, enquanto alguns exploradores de Marte atuais ainda levam quase uma hora.
Por que um robô de quatro patas está mexendo com a exploração espacial
Quando alguém imagina veículos para Marte, normalmente pensa em caixas sobre rodas como Curiosity ou Perseverance. Esses exploradores funcionam bem, mas avançam devagar. Em um dia marciano, muitas vezes percorrem apenas algumas centenas de metros. O motivo não é só o terreno complicado, mas também a longa distância de comunicação entre a Terra e Marte.
Os sinais podem levar até 22 minutos para chegar ao explorador. Cada ajuste de rota, cada parada e cada novo planejamento consome tempo. Na Lua, o cenário não melhora muito: crateras, blocos de rocha e encostas íngremes são obstáculos traiçoeiros para rodas.
Um quadrúpede criado em Zurique foi pensado para contornar esse problema básico. Ele se desloca sobre superfícies irregulares como um animal, carrega seus próprios equipamentos de análise e toma muitas decisões ali mesmo, sem precisar esperar instruções da Terra o tempo todo.
A ideia é reduzir o controle remoto, ampliar o cérebro do robô - e juntar isso a pernas fortes em vez de rodas delicadas.
ANYmal: o cão espacial com mini laboratório embarcado
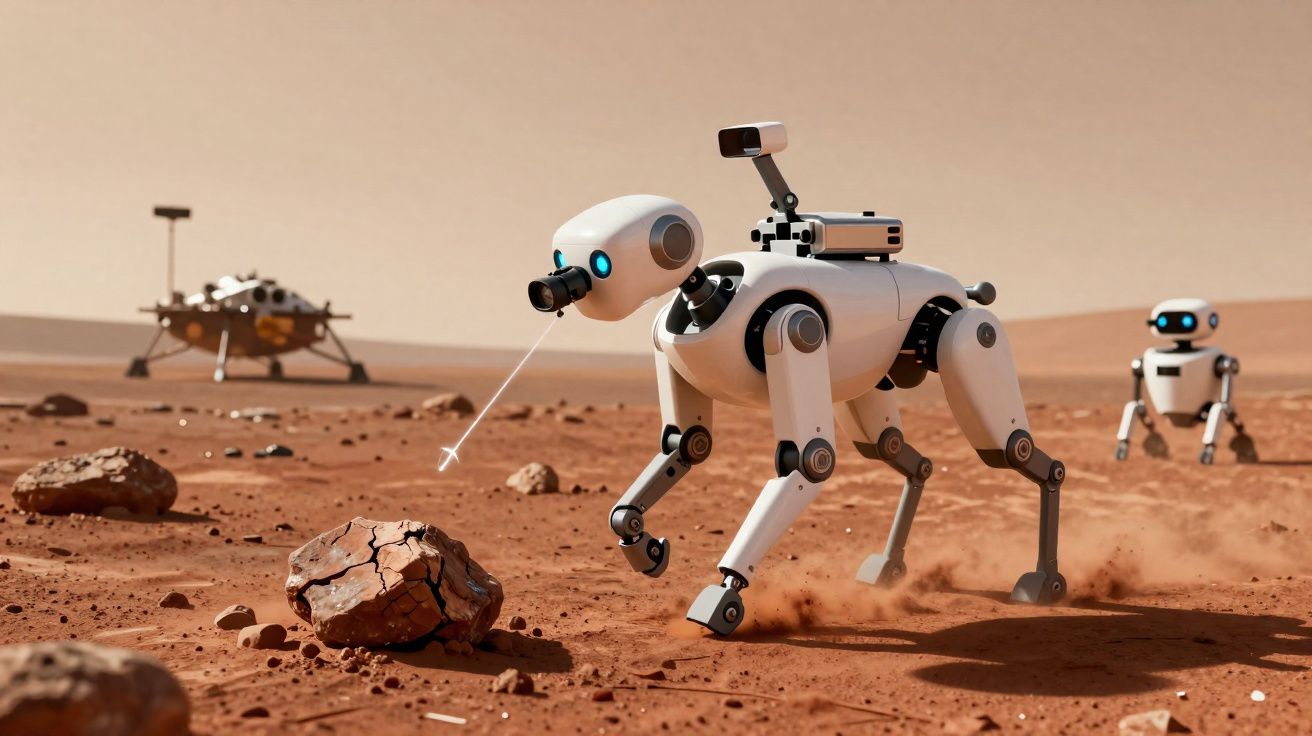
O robô se chama ANYmal e foi desenvolvido pela ETH de Zurique. Ele mede cerca de um metro de comprimento, anda sobre quatro pernas articuladas e, no visual, lembra os conhecidos “cães robóticos” que já aparecem em vídeos de áreas de teste.
Para a pesquisa espacial, o ANYmal recebeu um braço robótico extra, na extremidade do qual ficam dois instrumentos científicos. Com isso, ele se transforma em um laboratório móvel capaz de caracterizar rochas diretamente no local.
Câmera microscópica e espectrômetro Raman na bagagem
Dois equipamentos compactos fazem o trabalho principal:
- Câmera microscópica (MICRO): produz imagens extremamente ampliadas das superfícies das rochas. Assim, é possível distinguir minerais e identificar texturas que revelam como elas se formaram.
- Espectrômetro Raman: ilumina a rocha com um laser e analisa a luz espalhada de volta. Desse processo sai a composição química do material, inclusive com indicação de fases minerais específicas.
Com essa combinação, o robô não precisa recolher amostras e levá-las até uma estação fixa de laboratório. Ele “interroga” a rocha no próprio local. Em testes realizados em um laboratório marciano da Universidade de Basileia, o ANYmal reconheceu diferentes tipos de rocha, entre eles gesso, carbonatos, basalto, dunito e anortosito - materiais relevantes tanto para a Lua quanto para Marte.
Amostras de rocha que antes exigiam horas de planejamento podem ser analisadas pelo ANYmal em uma única rotina contínua de trabalho.
Velocidade: 12 minutos contra 41 minutos
O teste ficou especialmente interessante quando a equipe da pesquisadora Gabriela Ligeza comparou dois modos de operação. No primeiro cenário, um geólogo conduzia o robô passo a passo: escolher o alvo, ir até lá, posicionar os instrumentos de medição, coletar os dados, seguir para o próximo ponto. Esse modo clássico lembrava bastante a prática atual em Marte - e, no experimento, levou 41 minutos para uma sequência completa de medições.
No segundo cenário, o ANYmal recebeu vários alvos ao mesmo tempo. A partir daí, passou a trabalhar de forma majoritariamente autônoma. Ele planejou a própria rota, visitou os pontos em sequência, posicionou o braço e os instrumentos e reuniu os dados. As pessoas só interferiam quando surgia algo inesperado.
O resultado surpreendeu até os pesquisadores: conforme a configuração, o robô precisou de apenas 12 a 23 minutos para executar a mesma tarefa. Ou seja, duas a três vezes mais rápido do que com comando humano contínuo.
A maior economia de tempo acontece porque as várias pausas de comunicação desaparecem - o robô não fica mais aguardando, ele trabalha.
Vantagens da construção com quatro patas no espaço
A velocidade não vem só do software, mas também do hardware. A experiência acumulada em quatro anos com exploradores de Marte mostra que as rodas encontram limites claros em terrenos muito recortados. Quatro pernas articuladas oferecem algumas vantagens importantes:
- Obstáculos: degraus, blocos de rocha e bordas de crateras ficam mais fáceis de superar.
- Estabilidade: para medições precisas, o robô pode se apoiar com as pernas afastadas.
- Flexibilidade: ele alcança pontos sob saliências ou dentro de fendas, onde o corpo de um explorador sobre rodas não entra.
- Segurança: a cinemática das pernas ajuda a compensar tropeços e, se necessário, a recuperar o equilíbrio.
No laboratório, o ANYmal demonstrou que consegue levar seu instrumento de medição até a superfície da rocha com precisão milimétrica, mesmo sobre um piso desigual - requisito básico para imagens microscópicas nítidas e medições a laser estáveis.
Como o robô de quatro patas pode impulsionar missões lunares
Para futuras missões lunares, um ponto ganha cada vez mais destaque: recursos no próprio local. As bases planejadas vão precisar de água, metais e materiais adequados para construção. Ninguém quer lançar toneladas de material da Terra se parte disso já estiver logo ali, no solo lunar.
O ANYmal poderia, por exemplo, atuar em uma cratera polar, onde se suspeita da presença de água congelada no subsolo. Ele percorreria de maneira sistemática paredões rochosos e campos de detritos, perfuraria as rochas ou, ao menos, as atingiria com laser, e a partir daí elaboraria mapas. Esses mapas indicam onde as substâncias úteis se concentram e quais regiões valem a pena para robôs de mineração no futuro.
Com vários desses quadrúpedes, grandes áreas poderiam ser cobertas com relativa rapidez. Uma possibilidade é um cenário em que uma nave-mãe em órbita define objetivos gerais, enquanto os robôs no solo decidem sozinhos como mapear os detalhes.
Em busca de sinais de vida em Marte
Em Marte, a prioridade é outra: encontrar vestígios de formas de vida passadas ou atuais. Os pesquisadores chamam isso de “assinaturas biológicas”. Trata-se de padrões químicos ou estruturas minerais que normalmente surgem por processos biológicos.
O espectrômetro Raman do ANYmal é justamente especializado nesse tipo de sinal. Ele identifica, por exemplo, moléculas orgânicas ou minerais que só se formam na presença de água e de ambientes químicos adequados. Especialmente interessantes são as rochas sedimentares, isto é, depósitos de rios, lagos ou mares que provavelmente existiram no Marte jovem.
Um robô caminhante, rápido e autônomo, poderia visitar muito mais pontos de coleta em uma região marciana do que um explorador clássico - e, com isso, aumentar a chance de encontrar possíveis assinaturas biológicas.
Robôs em enxame e próximos passos
O ANYmal não é um projeto isolado. Outros grupos de pesquisa vêm trabalhando em equipes inteiras de robôs caminhantes, capazes de cobrir uma área de forma coordenada. Um quadrúpede examina, por exemplo, paredes rochosas; outro faz o mapeamento do solo; um terceiro verifica locais suspeitos com instrumentos mais sensíveis.
A visão é que um conjunto de várias unidades autônomas percorra uma região, troque dados entre si e defina em conjunto onde novas medições fazem mais sentido. Os humanos entrariam apenas nas decisões estratégicas.
Desafios do cão espacial em Marte e na Lua
Antes que o ANYmal ou seus sucessores realmente cheguem à Lua ou a Marte, ainda restam questões em aberto:
- Radiação: a eletrônica e os sensores precisam de blindagem muito melhor do que a exigida em laboratório.
- Temperaturas: o frio extremo e as variações bruscas de temperatura pesam sobre baterias e mecanismos.
- Poeira: o rególito fino danifica juntas e ópticas quando não há vedações e coberturas especiais.
- Fornecimento de energia: painéis solares ou fontes radioativas precisam ser leves o bastante para não anular a vantagem do robô caminhante ágil.
Ao mesmo tempo, os testes no laboratório marciano terrestre abrem novas perguntas de pesquisa: quanto de autonomia uma missão pode aceitar do ponto de vista político e de segurança? Como um sistema assim reage quando alguns sensores falham? E como garantir que a qualidade dos dados continue alta mesmo com o aumento da velocidade?
O que o leitor deve guardar
O ANYmal mostra como os avanços em robótica e miniaturização estão mudando a prática da exploração espacial. Quatro pontos se destacam nos resultados já obtidos:
- Robôs com quatro patas lidam com terrenos difíceis com muito mais segurança do que exploradores clássicos.
- Mini laboratórios integrados permitem analisar rochas sem a etapa trabalhosa de coleta.
- Modos de trabalho semiautônomos reduzem de forma drástica o tempo de missão por alvo de investigação.
- A tecnologia serve tanto para buscar recursos na Lua quanto para procurar assinaturas biológicas em Marte.
Para as missões futuras, isso aponta para uma nova classe de veículos espaciais: não mais um explorador lento, controlado à distância, mas robôs caminhantes ágeis e capazes de aprender, que encontram o caminho até nas crateras mais hostis - e entregam dados que os planetólogos aguardam há décadas.






Comentários
Ainda não há comentários. Seja o primeiro!
Deixar um comentário